Google Classroom
Google Classroom
GeoGebra
GeoGebra Classroom
Abrir sesión
Buscar
Google Classroom
Google Classroom
GeoGebra
GeoGebra Classroom
Esquema
MMT: Synthesis of Mechanisms
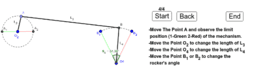
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
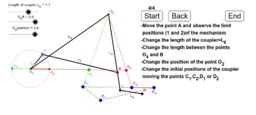
Synthesis of two angular positions with no Quick Return
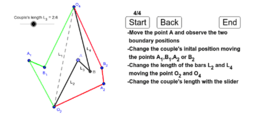
Synthesis of two positions for the coupler
Synthesis of a four bar for 3 posess
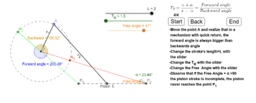
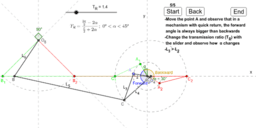
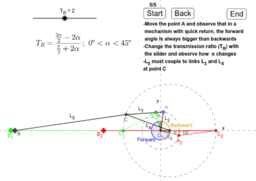
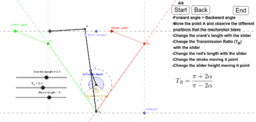
Synthesis of two angular position follower with Quick Retu
Synthesis of a slider crank with quick return
Synthesis of a Double 4-bar Quick Return
Synthesis of a 6 bar quick return slider crank
Synthesis of a Quick Return Mechanism
Synthesis of trajectory generation for 3 points in specified
Synthesis of 4 bar for 3 coupler's points
Single dwell with dyad
Single Dwell Mechanism with slider
Double rocker mechanism with dyad
MMT: Synthesis of Mechanisms
Autor:
Andereguillor
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
Synthesis of two angular positions with no Quick Return
Synthesis of two positions for the coupler
Synthesis of a four bar for 3 posess
Synthesis of two angular position follower with Quick Retu
Synthesis of a slider crank with quick return
Synthesis of a Double 4-bar Quick Return
Synthesis of a 6 bar quick return slider crank
Synthesis of a Quick Return Mechanism
Synthesis of trajectory generation for 3 points in specified
Synthesis of 4 bar for 3 coupler's points
Single dwell with dyad
Single Dwell Mechanism with slider
Double rocker mechanism with dyad
Siguiente
Synthesis of two angular follower's position with no quick return for a rocker's path ϴ4
Nuevos recursos
bewijs stelling van Pythagoras
Random Polar Curve (3)
Cartesian vs Polar
Slope Between 2 Points (Phase 2)
အခြေခံ data အခေါ်အဝေါ်များ
Descubrir recursos
Complex Numbers: What's My Rule?
number 3 page 37
Geometry Year 2
รูปเรขาคณิตสามมิติ
A Plethora of Practice Problems
Descubre temas
Distribución normal
Construcciones
Distribución de frecuencias
Pirámide
Ecuaciones