Google Classroom
Googleクラスルーム
GeoGebra
GeoGebra Classroom
ログイン
探す
Google Classroom
Googleクラスルーム
GeoGebra
GeoGebra Classroom
概要
Transformations By Makayla Princiotta
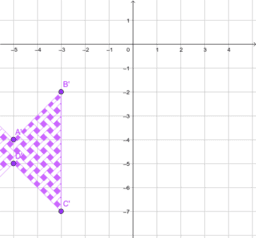
Rotation
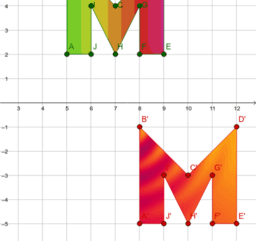
Translation
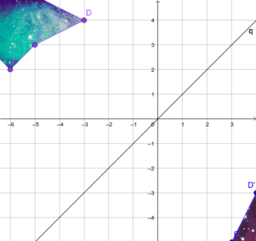
Reflection
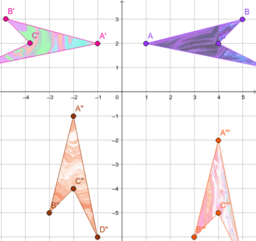
Composition of Transformations (1)
Composition of Transformations (2)
Transformations By Makayla Princiotta
作成者:
Makayla Princiotta
Rotation
Translation
Reflection
Composition of Transformations (1)
Composition of Transformations (2)
次へ
Rotation
新しい教材
bewijs stelling van Pythagoras
Building Triangles with Set Areas
Superellipse
Perimeter of Rectangle
z`]]
教材を発見
triple tore
Right Triangle Trig: Solving for Sides (2)
türev formülleri toplam
トピックを見つける
立方体
円錐
角錐
割り算
台形